


Navio 2
Navio 2 z akcesoriami
2 399,00 zł
Autopilot HAT dla Raspberry Pi obsługiwany przez ArduPilot i ROS.
- Navio2
- Connector for RPi
- 4x spacers
- 8x M2.5 screws
Opis
Zmień swój Raspberry Pi® w kontroler drona
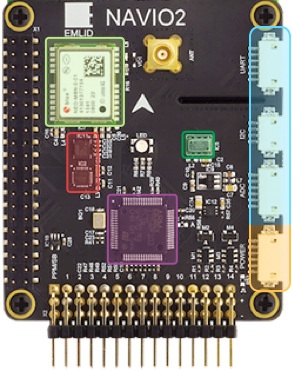
Odbiornik GNSS
Śledzi satelity GPS, GLONASS, Beidou, Galileo i SBAS.
Antena zewnętrzna ze złączem MCX
Podwójny IMU
Akcelerometry, żyroskopy i magnetometry do orientacji i wykrywania ruchu
Porty rozszerzeń
Odsłonięte interfejsy ADC, I2C i UART dla czujników i radiotelefonów
Potrójny redundantny zasilacz
Z ochroną przeciwprzepięciową i portem modułu mocy do wykrywania napięcia i prądu
Barometr wysokiej rozdzielczości
Wyczuwa wysokość z rozdzielczością 10 cm
Koprocesor RC I / O
Akceptuje wejście PPM / SBUS i zapewnia 14 kanałów wyjściowych PWM dla silników i serwomechanizmów
IMU
Barometr
Wyjście PWM
Wstępnie skonfigurowany obraz systemu operacyjnego
To jest Raspbian, który znasz z zainstalowanym ArduPilot i ROS
i gotowy do uruchomienia za pomocą kilku prostych poleceń.
Zawiera również DroneKit i GStreamer.

Misje programowe
Użyj ROS lub DroneKit, aby twój dron wykonał zaprogramowane czynności i zareagował na zmieniające się warunki

Transmitowane wideo
Przenieś wideo o niskim opóźnieniu z modułu kamery Raspberry Pi do naziemnej stacji kontroli za pomocą GStreamer
Kontrola przez internet
Podłącz modem 3G / LTE, aby połączyć się z dronem z dowolnego miejsca na świecie i uzyskać dostęp do danych wideo i telemetrycznych
Specyfikacja
Mechaniczny
Rozmiar:
55 x 65 mm
Waga:
23 g
Temperatura pracy:
-40… + 85ºC
Elektryczny
Napięcie zasilania:
4,75–5,25 V.
Zasilacz:
moduł zasilania, szyna serwomechanizmu, USB
Średni pobór prądu:
<150mA
Porty
Moduł zasilania
UART
I2C
ADC
12 wyjść serwo PWM
Wejście PPM / S.Bus
IC
MPU9250 9DOF IMU
LSM9DS1 9DOF IMU
Barometr MS5611
U-blox M8N GLONASS / GPS / Beidou (złącze antenowe MCX)
Koprocesor we / wy RC Cortex-M3
RGB LED